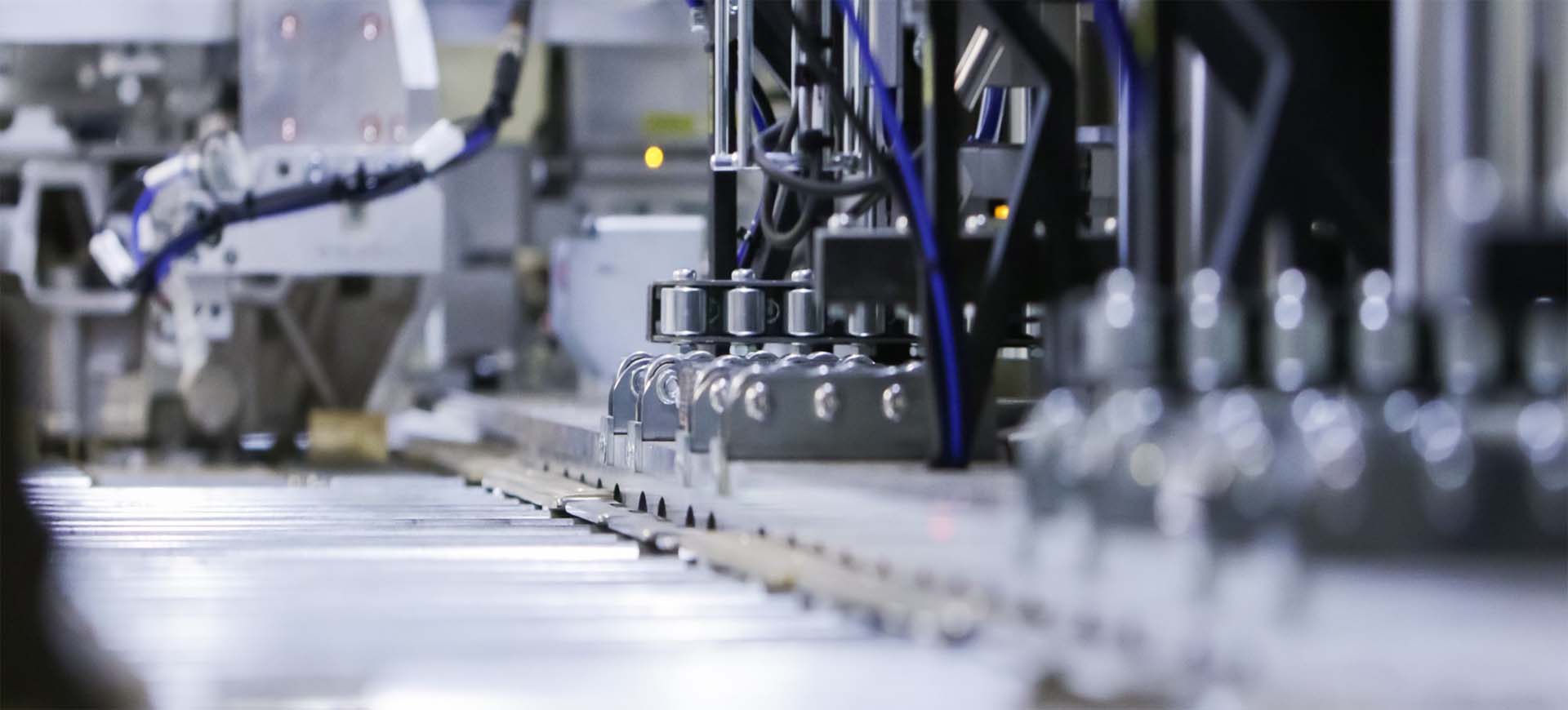
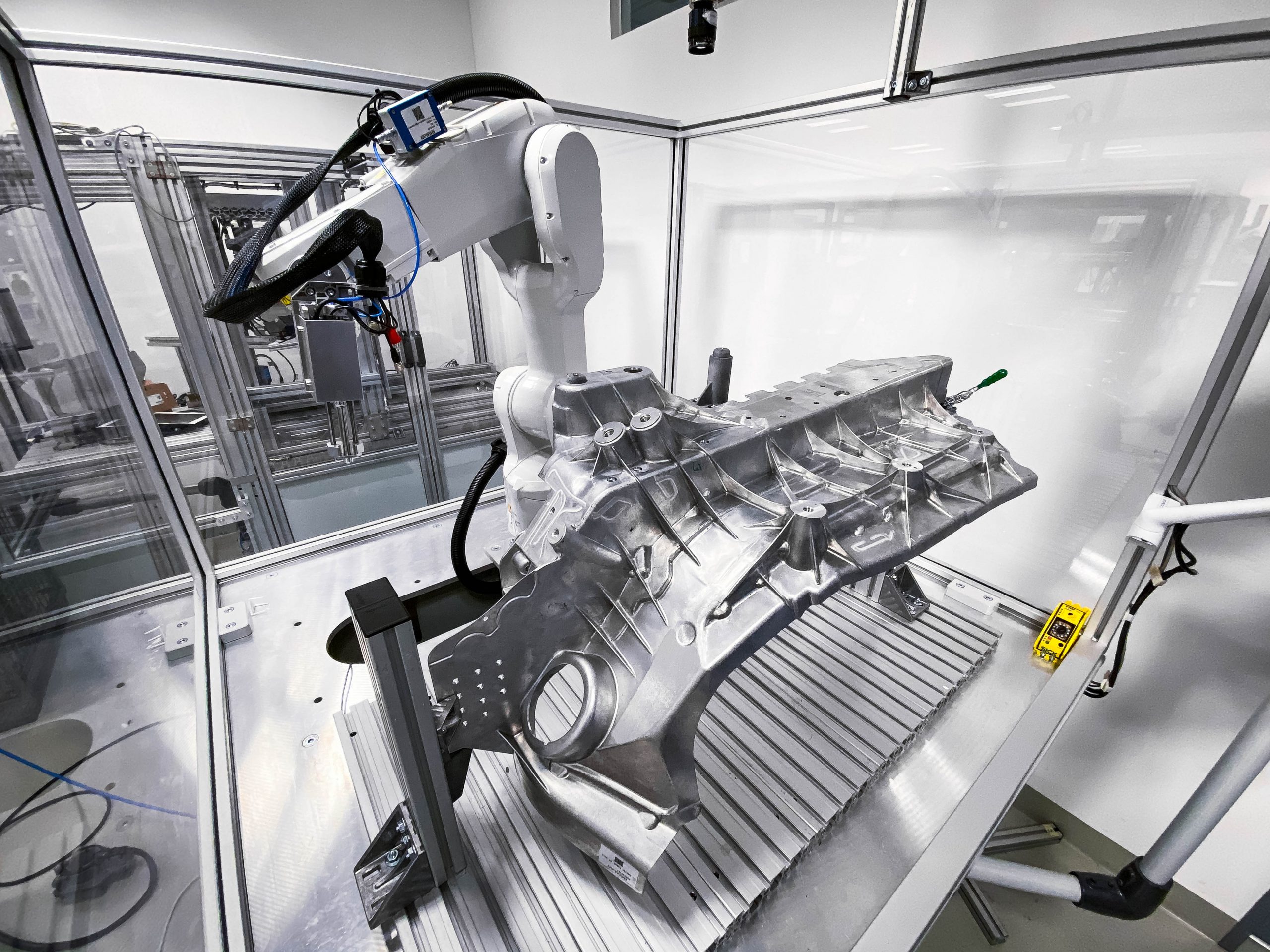
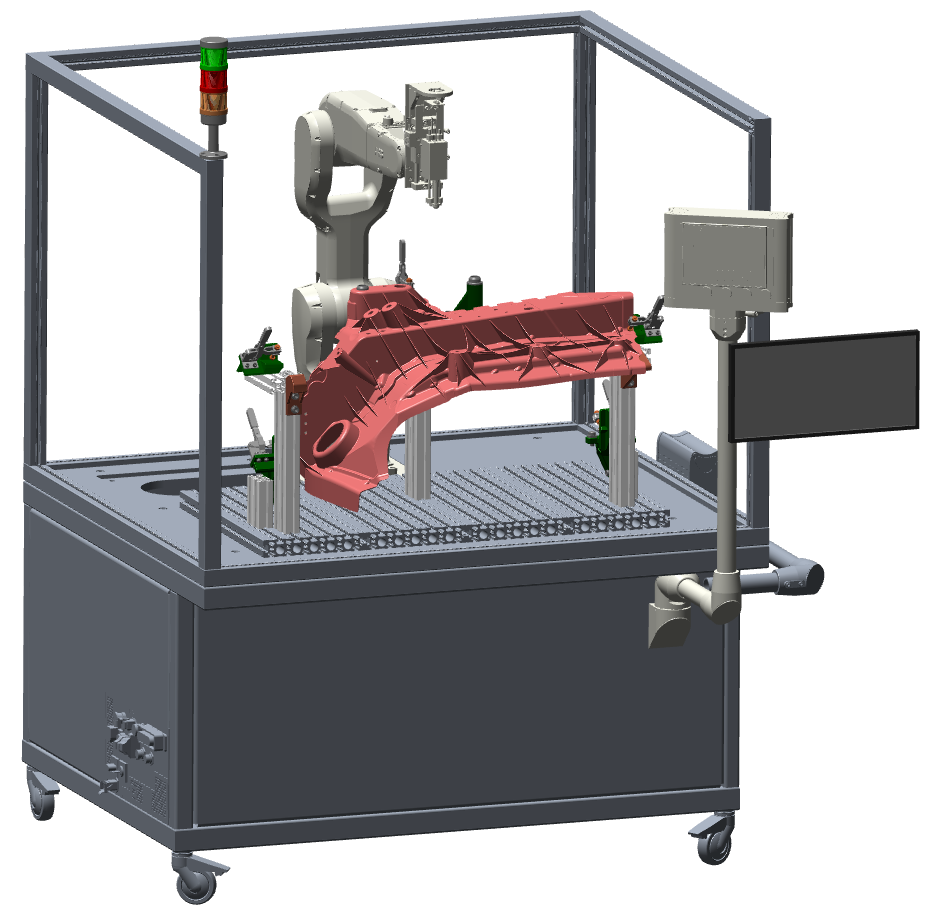
The inspection hardware is mounted on one or more interconnected robots. The location of the final robotic station is widely flexible. The final robotic station may be part of another robotic cell, an automated line into which the parts come along a conveyor, or it may be standing-alone and the parts may be loaded into it manually by the operator, or by another robot.
This application is most often used to check the quality of threads, dimensions or surface defects on large complex parts.























{kind=link}